Mechanical Design
For the mechanical design we chose the Wheeled-Base Robot as our final design.
The design is shown below:
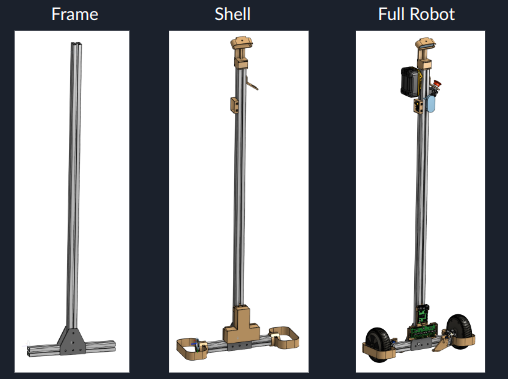
Frame
For the main frame, to ensure rigidity and durability, we chose T-slotted aluminum extrusion, which includes a slot for a threaded insert to secure the components.
This extrusion is readily available and cost-effective in bulk, making it a practical choice for the robot’s frame.
Shell
The shell is made from 3D printed ABS plastic, for the wheel mounts and the base of the robot.
The 3D printed parts are cost-effective and allow for easy modifications to the robot’s design.
The camera mount and raspberry pi case are also 3D printed for easy iteration.
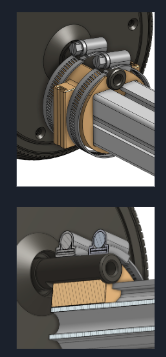
Motor Mounting
Auto-deploy legs
The legs are designed to deploy automatically when the robot is powered on and is not in balancing mode. This is to ensure the robot is always ready to move when needed, does not fall over and does not get damaged. Additionally, when in idle mode, the legs are deployed such that power is not consumed by the motors for balancing.
