Best Solution
Constraints and Criteria
The constraints and criteria we use to evaluate the designs are as follows:
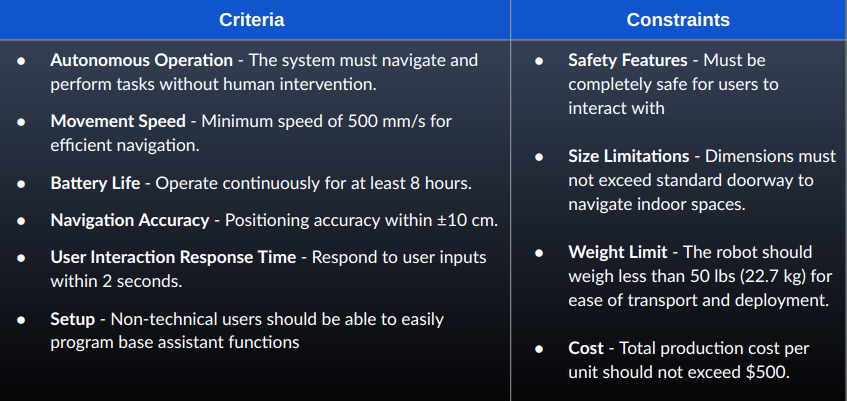
Specific criteria for the best solution are as follows:

Potential Designs
Design 1: Humanoid Robot
A robot with a human-like appearance, featuring limbs, a torso, and a head, designed to interact with users in a natural and engaging manner. It replicates human movements and gestures to facilitate intuitive communication and enhance user experience. (Natural interaction, Enhanced user experience)
Design 2: Wheeled-Base Robot
A mobile robot that navigates using wheels, equipped with sensors and a user interface to interact with users. It focuses on efficient movement within indoor environments and provides essential functionalities through a stable platform, additional features by add-ons. (Modular, Cost-Effective, Scalable)
Design 3: Drone-Based Assistant
An aerial robot capable of flight, designed to offer assistance from the air by moving quickly across different locations. It is equipped with cameras and communication tools to interact with users remotely and cover large areas efficiently. (Rapid Deployment, Monitoring, Wide Coverage)
Design Selection Matrix
We construct a design selection matrix to evaluate the potential designs based on the constraints and criteria.
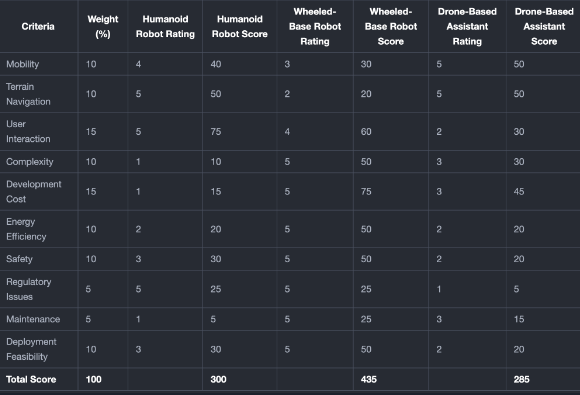
From this the chosen design is the Wheeled-Base Robot.
Justification:
Simplicity and Reliability: Easier to develop and maintain, ensuring project feasibility.
Cost-Effective: Fits within budget constraints while meeting user needs.
User Accessibility: Provides sufficient interaction capabilities without unnecessary complexity.
Energy Efficiency: Longer operational periods due to efficient power usage.
Safety and Compliance: Fewer safety risks and regulatory hurdles compared to drones